02-14
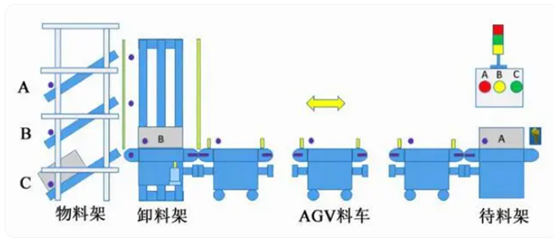
2025該智能化場景為AGV智能倉庫物流解決方案,由AGV料車,、待料架 ,、物料架,、卸料架和MES 系統(tǒng)組成等單元組成,場景下圖所示,。通過MES將庫房端與物料需求端連接起來,,實現(xiàn)庫房與物料需求端物料輸送的自動對接。
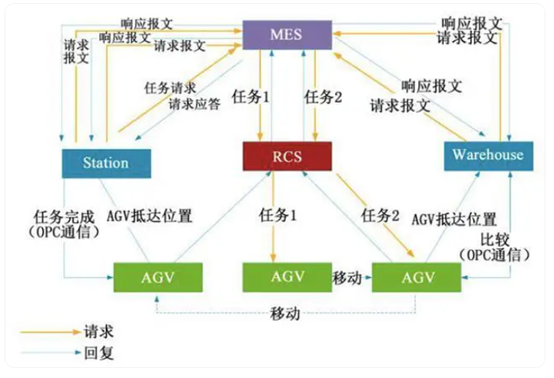
MES和倉儲工作站/工位接駁站的數(shù)據(jù)互聯(lián)
當貨架缺料時,,貨架設備向 MES 系統(tǒng)發(fā)出缺料請求信息,,報文中包括缺料的型號。MES系統(tǒng)通過隊列將RCS創(chuàng)建任務所需的信息傳遞給RCS系統(tǒng),。當RCS創(chuàng)建AGV小車任務成功,,將命令下達給AGV小車,AGV根據(jù)規(guī)劃好的路徑向倉庫移動,。到達指定地點后,,AGV通過透傳任務將信息傳達給倉庫PLC。倉庫工作站通過向MES系統(tǒng)發(fā)送信息,,確認送達的物料型號準確,,并通過報文向MES系統(tǒng)傳達任務已完成的信息。
在 MES 系統(tǒng)的工作系統(tǒng)層面,,當卸料架發(fā)出缺料信息后,,將指令發(fā)給AGV管理系統(tǒng)RCS,主要內(nèi)容有目的地+身份ID ,、物料類型 ,、物料數(shù)量等;AGV管理系統(tǒng)接受好任務后將狀態(tài)反饋給 MES,,并駛向待料架 PLC1,;AGV到達待料架PLC1,AGV將到位和準備信號告知待料架PLC1,,同時將身份ID + 物料類型 ,、物料數(shù)量傳至待料架PLC1。
AGV收到待料架PLC1反饋的準備信號之后開始接收物料架,,待判斷接收好物料框并同時收到待料架PLC1的完成信號后,,載著物料框開始駛向卸料架 PLC2;AGV 到達卸料架PLC2,,將到位和準備信號告知卸料架 PLC2,,收到卸料架PLC2 反饋的準備信號之后開始輸送物料框,待收到卸料架PLC2收料的完成信號后,,回到充電樁或進行下一個工作周期,。AGV 與線邊 PLC1&2 的數(shù)據(jù)交換,數(shù)據(jù)通訊采用 OPC 客戶端與服務端的方式,,如下圖所示,。